Explore My
Experience
Research Assistant
ROAHM Lab, UMich • Sep 2024 -
Working on safe motion planning to generate trajectories for high order systems (like digit). Generated joint reachable sets and spherical forward occupancy for digit. Trained neural nets to predict joint center and radii for safe planning. Working side-by-side on learning based safe motion planning for bimanual arms with safety constraints to pick and place objects. Trained and optimized neural nets to predict joint center and radii, predict control input bound and predict signed distance functions to generate safety constraints for optimization problem.

Fleet Managment System - Mobile Robotics Intern
Addverb Technologies • Jan 2024 - July 2024
Contributed to C++ stack, optimized system leading to 10% improvement in performance. Introduced new algorithmic changes for global planner, real-time node property updates, map optimization, task generator and allocator. Developed GUI features enhancing map editing features, improved log extraction and debugging system, and introduced new simulation features to enhance the overall productivity of the software by 30%.
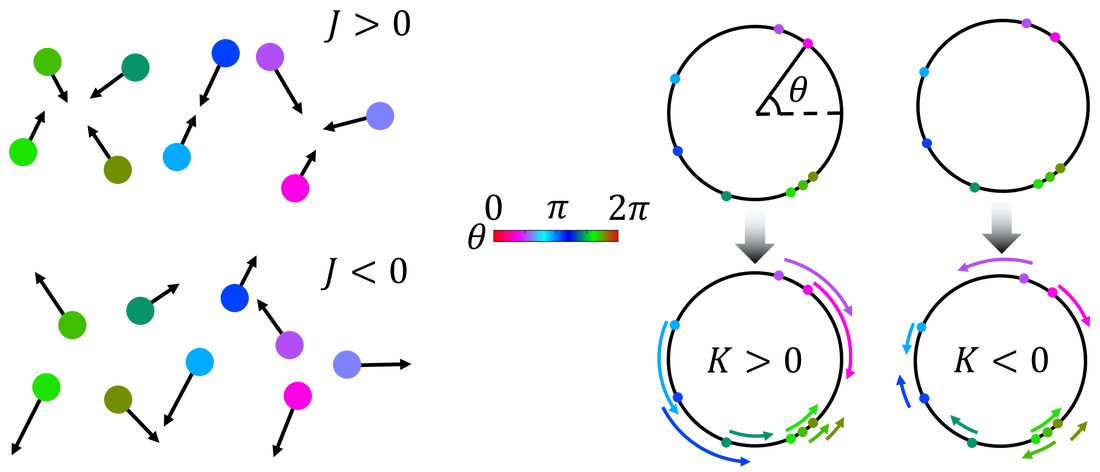
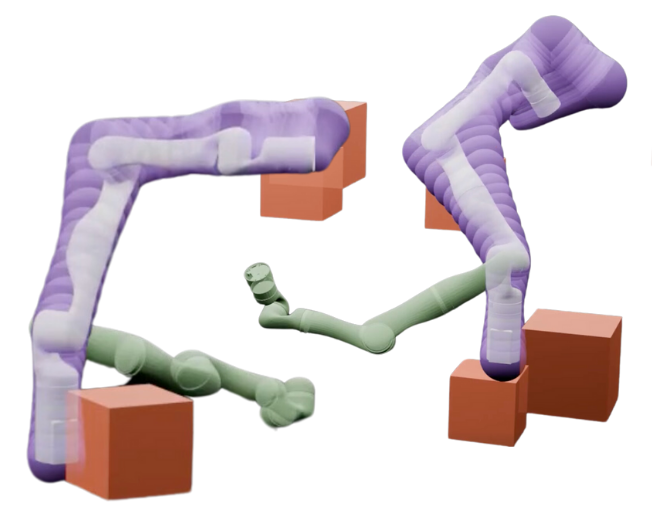
Research Assistant
SAM Lab, UMich • Jan 2025
Working on swaramalators that can reconfigure, move together, and manipulate their surroundings. Currently studying how various formations can self-organize. As well as studying the control of these microcollectives to assemble, expand, compress and travel.

Team Captain - Rover
MARS, Thapar • 2022 - 2023
Initiated and led successful development of Thapar University's first Rover (equipped with a robotic arm, soil analysis and autonomous system) for participation in International Rover Challenge ’23. Pioneered the entire project, secured funding and guided team members. Designed all sub systems after thorough research of existing rovers, ranked 6th in the overall competition and awarded “Emerging Team of the Year”.
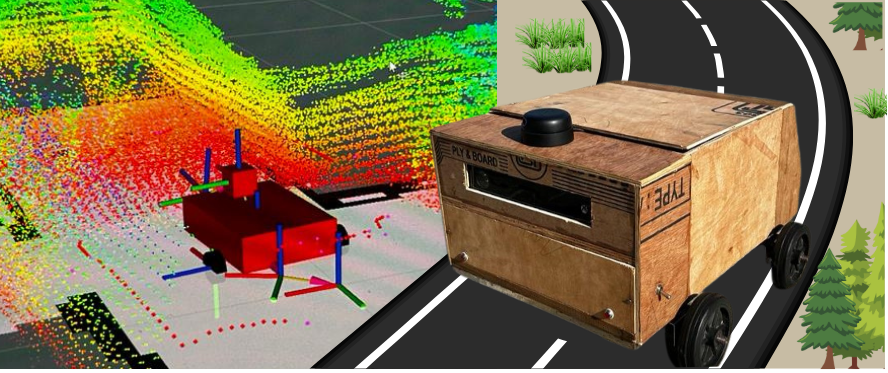
Team Lead - Food Delivery Robot
ELC, Thapar • Jan 2023 - Nov 2023
Designed and developed a cost-effective autonomous delivery robot utilizing RGBD camera and 2D LiDAR, achieving 90% mapping accuracy in feature-sparse environments after sensor fusion through custom ROS packages. Implemented Fused: SLAM, localization and odometry algorithms integrating point cloud from multiple sensors, resulting in 20% improved localization and 30% improved odometry accuracy. Optimized navigation system combining modified A* global planner with time-elastic band local planner, achieving 95% success rate in dynamic obstacle avoidance at speeds up to 1.0 m/s.
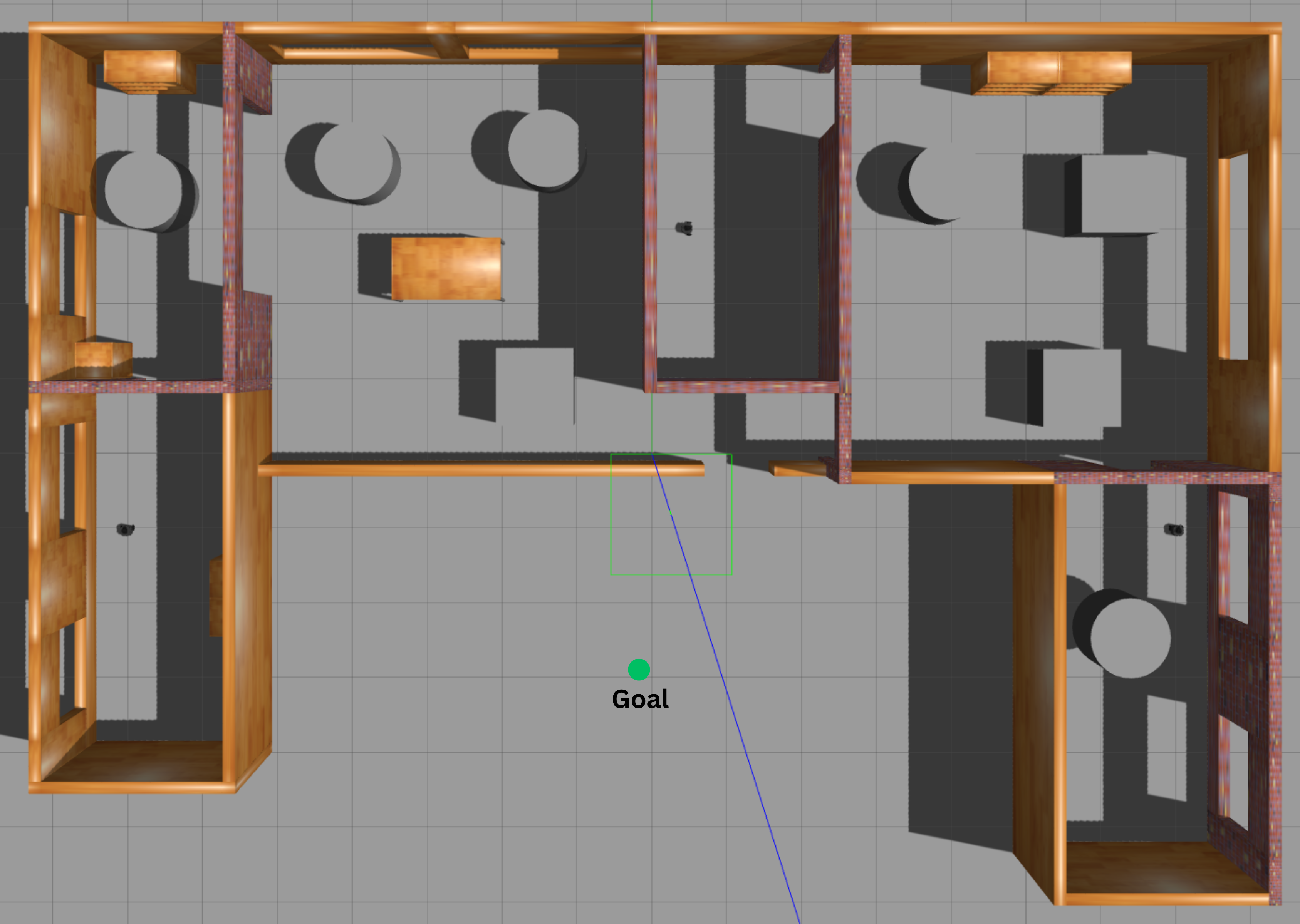
Reinforcement Learning Research Intern
Cyber Physical System Group, IIT Kanpur • May 2023 - Aug 2023
Developed a map less navigation framework using model-free reinforcement learning algorithms (Q-Learning, SARSA), for reliable autonomous navigation in unmapped environments, developed using ROS and Gazebo and optimized the system for reduction in training time by 30%. Successfully demonstrated decentralized navigation for four autonomous robots simultaneously, achieving collision-free path planning across 45m trajectories with 98% success rate over 20 trials.
Co-Founder, CEO
Botted • 2022-2024
Co-founded an Ed Tech robotics startup focused on popularizing robotics education throughcomprehensive and practical learning kits. Bridging the gap between theory and application, empoweringenthusiasts and professionals to excel in the rapidly advancing field of robotics.

Overall Student Coordinator
MARS, Thapar • 2020-2024
Reshaped the society's landscape by driving engagement and recognition. Orchestrated a series of dynamic workshops and competitions, resulting in a surge of college participation in robotics events. Secured additional funding and expanded the inventory, while effectively disseminating knowledge to a diverse audience.
What's next ?
Your Company ?